
ゴルフパターのスイング軌道を、IMU(慣性計測装置)で高精度に可視化する計測を実施しました。
ドローンやロボット制御でも課題となる「センサーデータの積分誤差」をいかに抑え、スポーツ動作の分析に活用できるか検証しています。
本記事では、金属3Dプリンタで造形したゴルフパターと、マイコンを用いたIMUデータの取得・解析プロセスを紹介します。
センサーデータの積分誤差とスポーツ動作の計測
IMUを使った位置推定では、加速度を積分することで誤差が累積しやすいことが知られています。
ドローンや自律移動ロボットでは、IMUは主に加速度や角速度のみを補助情報として利用し、GPSや地磁気センサーを基準に誤差を補正するのが一般的です。
今回の実験では、高精度IMUを用い、クォータニオン演算やフィルタリングを駆使して、ゴルフパターの動作解析に挑戦しました。
つぎは野球でやってみたい
金属3Dプリンタでパターを造形
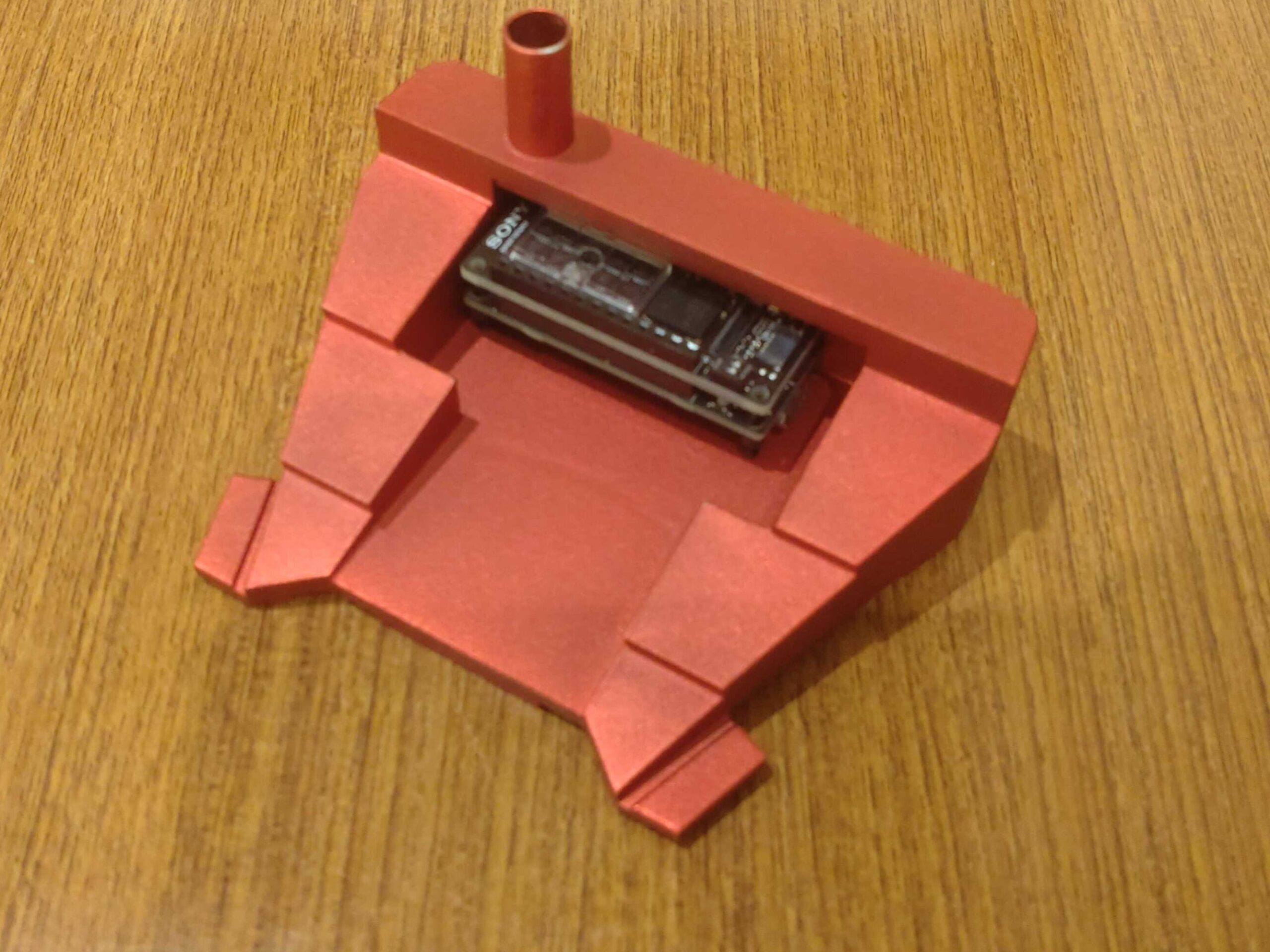
まず、アルミニウム系材料を用いて金属3Dプリンタでゴルフパターを造形しました。
このパターにIMUを搭載し、実際の打撃動作を計測します。
マイコンからシリアル通信でデータ取得
計測システムは以下の構成です。
- IMUモジュール(高精度6軸)
- マイコン(リアルタイムデータ取得)
- PCへのシリアル通信
- CSV形式で記録しPythonで解析
初回の実装のため、後処理の柔軟性を重視し、リアルタイム処理ではなくオフライン解析を採用しました。
ゴルフ経験者と未経験者の比較解析
被験者は2名です。
- Aさん:ゴルフ経験者。遠心力を意識した打撃
- Bさん:ゴルフ未経験
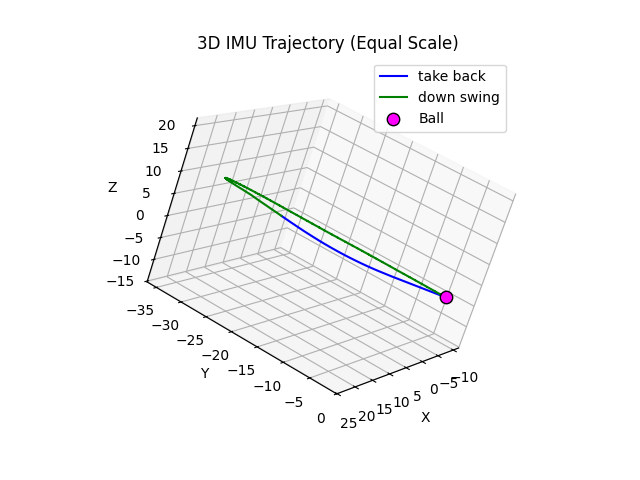
Aさんのスイングは、テイクバックを直線的に引いたのち、遠心力を使って打ち出す特徴が計測データに表れています。
緑色の軌跡が円弧を描いており、パターが安定した円運動をしていることが分かります。
Aさんのスイング
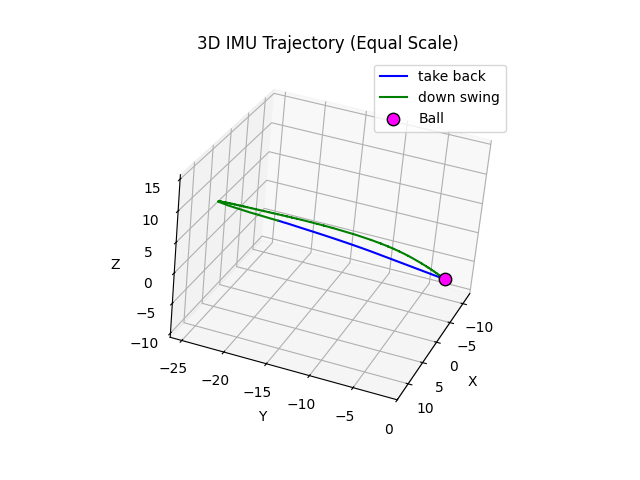
グラフの見方はヘッドは下記のように動いており、
Aさんは遠心力を使って打つことを意識していたため、緑色の線が円弧を描くように動いている。
テイクバックはまっすぐ引き、遠心力を使って打ち出す流れが計測データからみてとれる。
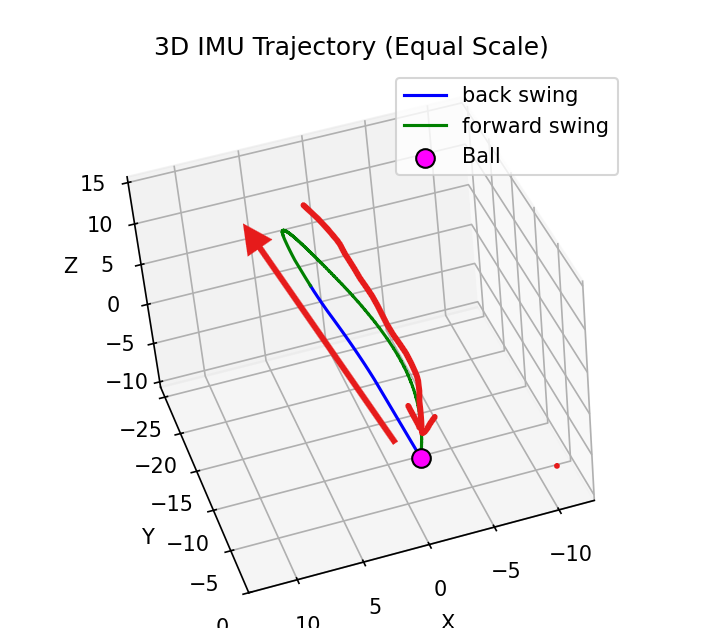
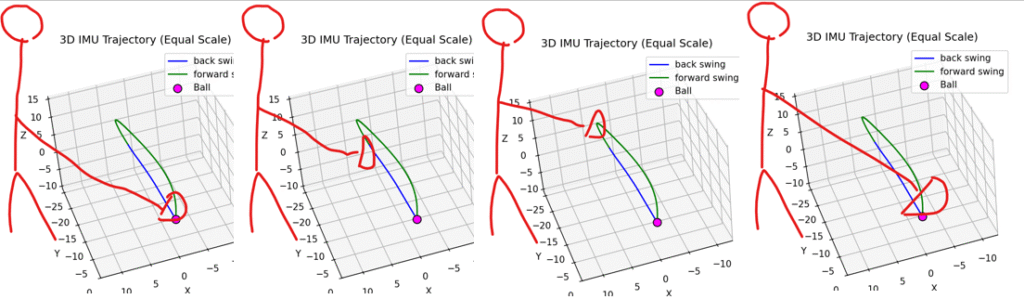
Bさんのスイング
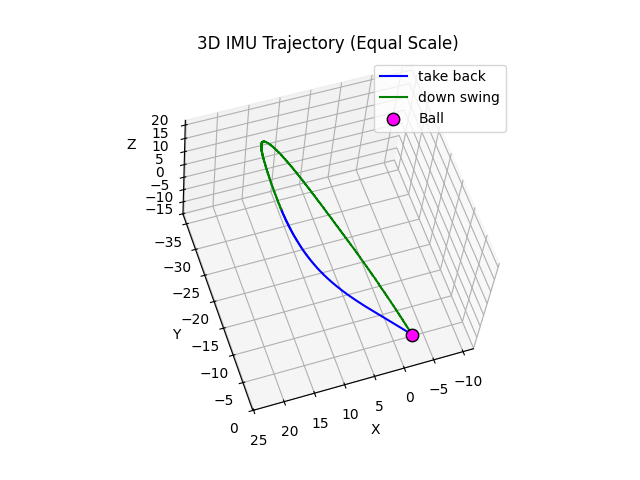
Bさんのスイングでは、テイクバックとダウンスイングの動きが不安定で、上から見るとアーモンド形の軌跡になっているのが特徴的です。
IMUのスイング計測の可能性と今後の展望
今回の計測はスポーツ動作の定量評価やスイング改善支援に向けた第一歩です。
将来的には以下を検討しています。
- 野球バットやテニスラケットへの応用
- リアルタイム軌跡フィードバック
- 複数センサーによる動作推定の高度化
- ドローン・ロボット制御技術の応用
まとめ
高精度IMUと3Dプリンタを活用したゴルフパター軌道の計測により、スポーツの技術分析に新たな可能性が広がります。
ドローンやロボティクスで培ったノウハウをスポーツ領域に展開する試みにご興味のある方は、ぜひお問い合わせください。